Роботизированный протез руки, управляемый активацией мышц
Кандидат в докторантуру университета Аалто Деннис Йенг и его исследовательская группа разработали и протестировали новый тип технологии, создающий лучшую совместимость между протезом и культей.
Разработчики создали полностью автоматизированную систему, которая обучается в процессе обычного использования и, таким образом, адаптируется к меняющимся условиям.
«В этой системе пользователь и система одновременно учатся друг у друга. Это потенциально может повысить удобство и надежность роботизированных протезов», — говорит Йенг.
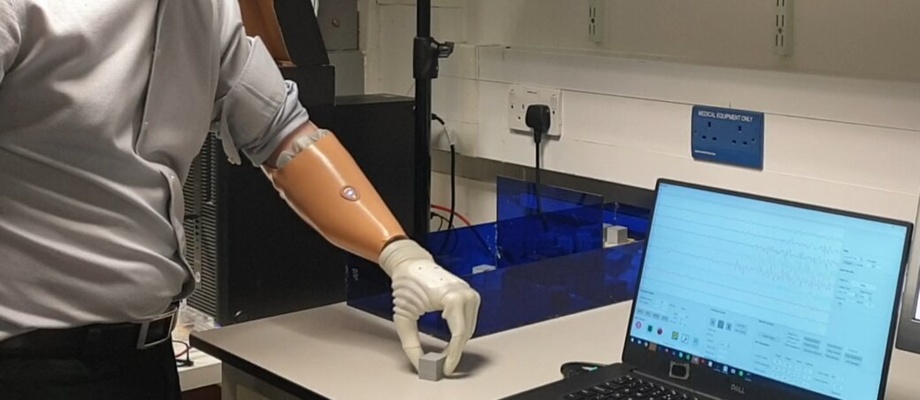
Они сравнивались с существующими в настоящее время системами. После успешных тестов исследовательская группа провела опыты с пользовательским интерфейсом и ультрасовременным протезом в Имперском колледже Лондона. Разработчики попросили человека с ампутированной конечностью переместить прищепки: подобные тесты широко используются физиотерапевтами для оценки функции верхних конечностей.
Функциональность системы была изучена с помощью контролируемых и стандартизированных тестов, но потребности пользователей лучше всего определяются с помощью качественных лонгитюдных исследований.
Люди, которым ампутировали верхнюю конечность, могут управлять роботизированным протезом, сокращая оставшиеся мышцы. Однако такие связи часто очень чувствительны к внешним факторам, таким как потоотделение, и со временем ослабевают. Для решения этой проблемы исследовательское сообщество предлагает различные алгоритмы, способные лучше адаптироваться к изменяющимся обстоятельствам.








Зарегистрируйтесь, чтобы оставлять комментарии
Вход
Заходите через социальные сети
FacebookTwitter